در عصر حاضر، شاهد همگرایی بیسابقهای بین هوش مصنوعی و رباتیک هستیم که منجر به ظهور پارادایم نوینی به نام «هوش مصنوعی تجسمیافته» (Embodied Artificial Intelligence) شده است. این مقاله به بررسی جامع این حوزه نوظهور میپردازد و نشان میدهد چگونه ترکیب تواناییهای شناختی هوش مصنوعی با قابلیتهای فیزیکی رباتها، انقلابی در تعامل ماشینها با دنیای واقعی ایجاد کرده است. با تحلیل معماریهای پیشرفته مدلهای بینایی-زبان-عمل (VLA)، بررسی چالشهای فنی و اخلاقی، و ارائه چشمانداز آینده، این پژوهش راهنمای جامعی برای درک وضعیت فعلی و آینده رباتیک پیشرفته ارائه میدهد.
۱. مقدمه
۱.۱ تعریف مسئله
برای دههها، هوش مصنوعی و رباتیک بهعنوان دو حوزه مجزا توسعه یافتهاند. هوش مصنوعی در فضای مجازی به پردازش داده، تشخیص الگو و پیشبینی میپرداخت، در حالی که رباتیک بر طراحی مکانیکی، سیستمهای کنترل و تعامل فیزیکی متمرکز بود. این جدایی منجر به محدودیتهای اساسی در قابلیتهای رباتها شد؛ رباتهایی که میتوانستند اشیاء را تشخیص دهند اما نمیدانستند چگونه با آنها تعامل کنند، یا سیستمهایی که دستورات زبانی را میفهمیدند اما نمیتوانستند آنها را به اقدامات فیزیکی تبدیل کنند.
با این حال، پیشرفتهای اخیر در مدلهای زبانی بزرگ (LLM) و مدلهای بینایی-زبانی (VLM) فرصت بیسابقهای برای غلبه بر این شکاف ایجاد کرده است. هوش مصنوعی تجسمیافته نشان میدهد که هوشمندی واقعی نه تنها از فرآیندهای شناختی، بلکه از تعامل پویای مغز، بدن و محیط نشأت میگیرد.
۱.۲ اهمیت موضوع
بازار جهانی رباتیک در حال رشد سریع است و پیشبینی میشود تا سال ۲۰۲۹ از ۷۳ میلیارد دلار فراتر رود. این رشد نهتنها به دلیل پیشرفتهای تکنولوژیک، بلکه به دلیل نیازهای واقعی صنایع مختلف از جمله تولید، لجستیک، مراقبتهای بهداشتی و خدمات است. کمبود نیروی کار در کشورهای توسعهیافته و تقاضای روزافزون برای اتوماسیون انعطافپذیر، نیاز به رباتهای هوشمندتر و سازگارتر را تشدید کرده است.
۱.۳ ساختار مقاله
این مقاله در هفت بخش اصلی سازماندهی شده است: پس از مقدمه، به مبانی نظری هوش مصنوعی تجسمیافته میپردازیم، سپس معماریهای پیشرفته مدلهای VLA را تحلیل میکنیم، پلتفرمها و فناوریهای کلیدی را بررسی میکنیم، کاربردهای عملی را معرفی میکنیم، چالشهای موجود را شناسایی میکنیم و در نهایت چشمانداز آینده را ارائه میدهیم.
۲. مبانی نظری: از هوش مصنوعی سنتی تا هوش تجسمیافته
۲.۱ تعریف هوش مصنوعی تجسمیافته
هوش مصنوعی تجسمیافته به سیستمهای هوشمندی اطلاق میشود که در نهادهای فیزیکی (عمدتاً رباتها) یکپارچه شدهاند و از طریق تعامل با محیط اطراف خود یاد میگیرند. برخلاف هوش مصنوعی سنتی که در محیطهای مجازی و با دادههای ایستا کار میکند، هوش تجسمیافته بر اهمیت حضور فیزیکی و تعامل با دنیای واقعی تأکید دارد.
این رویکرد چندین حوزه علمی را با هم ترکیب میکند:
- بینایی کامپیوتری: برای درک محیط بصری
- مدلسازی محیط: برای ساخت نمایشهای داخلی از فضای اطراف
- پیشبینی و برنامهریزی: برای تعیین اقدامات مناسب
- کنترل و اجرا: برای تبدیل تصمیمات به حرکات فیزیکی
- یادگیری تقویتی: برای بهبود عملکرد از طریق تجربه
- شبیهسازی مبتنی بر فیزیک: برای آموزش ایمن و کارآمد
۲.۲ تکامل تاریخی
تحول از رباتیک سنتی به سیستمهای هوش تجسمیافته را میتوان در چندین مرحله دستهبندی کرد:
نسل اول (دهه ۱۹۵۰-۱۹۸۰): رباتهای صنعتی با برنامهریزی ثابت که وظایف تکراری را در محیطهای کنترلشده انجام میدادند.
دوم (دهه ۱۹۸۰-۲۰۰۰): رباتهای مجهز به حسگرها که میتوانستند اطلاعات محیطی محدودی را دریافت کنند، اما هنوز به برنامهنویسی دستی وابسته بودند.
سوم (دهه ۲۰۰۰-۲۰۱۵): رباتهای مبتنی بر یادگیری ماشین که میتوانستند از دادهها یاد بگیرند، اما معمولاً برای وظایف خاص آموزش میدیدند.
چهارم (۲۰۱۵-۲۰۲۳): ظهور یادگیری عمیق و مدلهای بینایی-زبانی که امکان درک پیچیدهتری از محیط را فراهم کردند.
پنجم (۲۰۲۳-حال): عصر مدلهای پایهای (Foundation Models) و VLA که قابلیت تعمیم بین وظایف و محیطهای مختلف را دارند.
۲.۳ تفاوت هوش تجسمیافته با هوش مصنوعی سنتی
تفاوتهای بنیادین بین این دو رویکرد عبارتند از:
تعامل با محیط: هوش تجسمیافته در حلقه بسته حس-ادراک-برنامهریزی-کنترل-عمل عمل میکند، در حالی که هوش مصنوعی سنتی معمولاً بر دادههای ایستا کار میکند.
یادگیری از تجربه: سیستمهای تجسمیافته از طریق تعامل فیزیکی با دنیا یاد میگیرند، مشابه نحوه یادگیری انسانها.
سازگاری پویا: این سیستمها باید با تغییرات محیطی غیرمنتظره کنار بیایند و بهصورت بلادرنگ واکنش نشان دهند.
درک فضایی-زمانی: نیاز به فهم عمیق از روابط فیزیکی، نیرو، گشتاور و دینامیک حرکت دارند.
۳. معماریهای پیشرفته: مدلهای بینایی-زبان-عمل (VLA)
۳.۱ مفهوم و اهمیت مدلهای VLA
مدلهای بینایی-زبان-عمل (Vision-Language-Action Models) نشاندهنده یک تحول پارادایمی در رباتیک هستند. این مدلها با یکپارچهسازی سه حوزه که سنتاً بهطور جداگانه مطالعه میشدند—بینایی، زبان و عمل—هدف یادگیری سیاستهایی را دنبال میکنند که در وظایف، اشیاء، تجسمها (embodiments) و محیطهای متنوع قابل تعمیم باشند.
این قابلیت تعمیمپذیری انتظار میرود رباتها را قادر سازد تا وظایف جدیدی را با حداقل یا بدون داده اضافی خاص وظیفه حل کنند، که این امر استقرار واقعی انعطافپذیرتر و مقیاسپذیرتری را تسهیل میکند.
۳.۲ ساختار معماری
مدلهای VLA را میتوان به دو دسته اصلی تقسیم کرد:
۳.۲.۱ معماری تک-مدلی (End-to-End)
در این طراحی، که توسط مدلهایی مانند RT-2، OpenVLA و π0 استفاده میشود، درک صحنه و دستور زبانی بهطور همزمان برای تولید اقدامات ربات در یک مرحله forward انجام میشود. این رویکرد معماری را ساده نگه میدارد و تأخیر را کاهش میدهد.
مزایا:
- پیچیدگی محاسباتی کمتر
- تأخیر پایینتر در پاسخدهی
- آموزش و استقرار سادهتر
معایب:
- محدودیت در فرکانس کنترل برای وظایف دقیق
- چالش در بهروزرسانی اجزای جداگانه
۳.۲.۲ معماری دوسیستمی (Dual-System)
این طراحی، که توسط Helix و Groot N1 اتخاذ شده، معماری را به دو جزء جدا میکند:
سیستم اول (کند): مشاهده تصویر و دستورات متنی را پردازش میکند سیستم دوم (سریع): با فرکانس بالاتری اقدامات ربات را تولید میکند
دو جزء بهصورت end-to-end برای برقراری ارتباط آموزش میبینند. این تقسیم با هزینه افزایش پیچیدگی محاسباتی، مهارت و تأخیر را بهبود میبخشد.
۳.۳ مدلهای پیشرو در صنعت
۳.۳.۱ RT-2 (Robotic Transformer 2)
RT-2 که توسط Google DeepMind در اواسط ۲۰۲۳ توسعه یافت، پارادایم مدل بینایی-زبان-عمل را در رباتیک تثبیت کرد. این مدل بر پایه دو VLM پیشرفته، PaLI-X و PaLM-E، با fine-tuning بر روی دادههای نمایشی ربات واقعی ساخته شده است.
ویژگیهای کلیدی:
- ورودی: تصاویر دوربین همراه با توضیحات متنی
- خروجی: اقدامات ربات گسستهسازی شده بهعنوان توکنهای گسسته
- قابلیت استدلال چندمرحلهای با استفاده از chain-of-thought
- تعمیم قویتر برای وظایف جدید نسبت به RT-1
۳.۳.۲ OpenVLA
OpenVLA یک مدل VLA منبع-باز با ۷ میلیارد پارامتر است که در ژوئن ۲۰۲۴ توسط محققان دانشگاه استنفورد معرفی شد. این مدل بر روی مجموعه داده Open X-Embodiment، که حاصل همکاری ۲۱ موسسه و شامل بیش از یک میلیون اپیزود بر روی ۲۲ تجسم مختلف است، آموزش دیده است.
نوآوریهای معماری:
- ترکیب ویژگیهای تصویری با استفاده از DINOv2 و CLIP
- استفاده از backbone زبانی Llama-2
- خروجی توکنهای اقدام گسسته
عملکرد:
- با ۷ برابر پارامترهای کمتر، عملکرد RT-2-X (۵۵B) را با ۱۶.۵٪ نرخ موفقیت مطلق بیشتر در ۲۹ وظیفه پشت سر میگذارد
- قابلیت fine-tuning موثر برای تنظیمات جدید
- از Diffusion Policy به ۲۰.۴٪ بهتر عمل میکند
۳.۳.۳ π0 (Pi-Zero)
π0 توسط Physical Intelligence توسعه یافته و مدل پایهای VLA برای کنترل عمومی ربات است. این مدل بر روی مسیرهای ربات از ۸ تجسم مختلف آموزش دیده و قادر است:
- تعمیم cross-embodiment داشته باشد
- بازوهای رباتیک مختلف (تک-بازو، دوبازو) را کنترل کند
- طیف گستردهای از وظایف را انجام دهد
پیشرفت فنی:
- استفاده از مدل flow-matching برای تولید اقدامات پیوسته با فرکانس بالا (تا ۵۰ هرتز)
- head عمل از diffusion policy بهره میبرد
- π0-FAST: از Frequency-space Action Sequence Tokenization (FAST) استفاده میکند
۳.۳.۴ Gemini Robotics
مدلهای Gemini Robotics که توسط Google DeepMind در ۲۰۲۵ معرفی شدند، شامل دو جزء هستند:
Gemini Robotics 1.5:
- توانمندترین مدل vision-language-action
- اطلاعات بصری و دستورات را به دستورات حرکتی برای ربات تبدیل میکند
- قبل از انجام اقدام فکر میکند و فرآیند خود را نشان میدهد
- در بین تجسمها یاد میگیرد و یادگیری مهارت را تسریع میکند
Gemini Robotics-ER 1.5:
- توانمندترین مدل vision-language برای استدلال درباره دنیای فیزیکی
- بهطور بومی ابزارهای دیجیتال را فراخوانی میکند
- برنامههای چندمرحلهای مفصل برای تکمیل ماموریت ایجاد میکند
- عملکرد state-of-the-art در معیارهای درک فضایی
قابلیتهای پیشرفته:
- درک بصری و زبانی پیشرفته
- قابلیت استفاده از Google Search برای جستجوی اطلاعات
- برآورد موفقیت و پیشرفت
- قابلیت تطبیق با انواع مختلف ربات
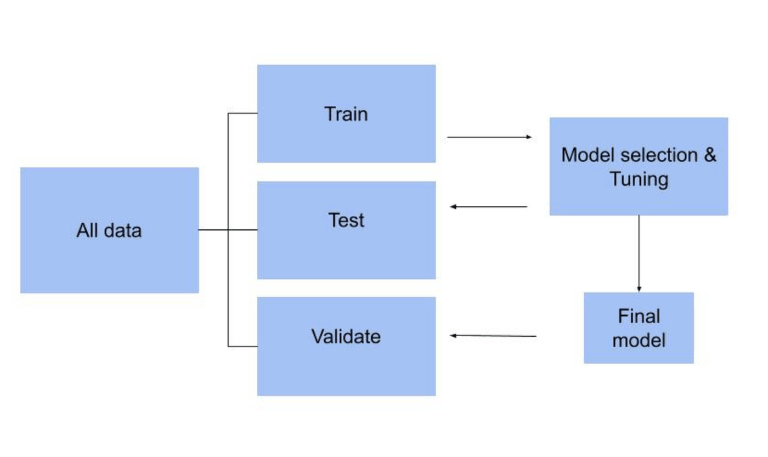
۳.۴ فرآیند آموزش و یادگیری
مدلهای VLA معمولاً بر روی VLMهای از پیش آموزشدیده تکیه میکنند که به ربات درک اولیهای از تصاویر و متن میدهند. در طول فرآیند آموزش، مدل بر روی دادههایی به فرمت (دستور متنی، مشاهده بصری، مسیر اقدام) fine-tune میشود و بنابراین یاد میگیرد مشاهدات بصری و دستورات متنی را به اقدامات ربات نگاشت کند.
مراحل آموزش:
۱. پیشآموزش: بر روی دادههای بزرگ اینترنتی (تصاویر و متن) ۲. Fine-tuning اولیه: بر روی دادههای نمایشی رباتیک عمومی ۳. تخصصیسازی وظیفه: تنظیم دقیق برای وظایف یا محیطهای خاص ۴. یادگیری آنلاین: بهبود مستمر از طریق تعامل با محیط واقعی
۴. پلتفرمها و فناوریهای کلیدی
۴.۱ پلتفرمهای سختافزاری
۴.۱.۱ ALOHA (A Low-cost Open-source Hardware)
ALOHA یک سیستم سختافزاری منبع-باز با هزینه پایین برای تلهاپریشن دودستی است که توسط دانشگاه استنفورد توسعه یافته است. این پلتفرم به هزینه حدود ۲۰,۰۰۰ دلار قابل ساخت است و طراحیهای سختافزاری، دستورالعملهای پرینت سهبعدی و سایر منابع آن بهطور کامل منبع-باز شدهاند.
ویژگیها:
- پلتفرمی برای وظایف دستکاری رباتیک با استفاده از تلهاپریشن انسانی
- استفاده بهعنوان testbed برای ارزیابی مدلهای VLA
- پشتیبانی از وظایف دستکاری دودستی
۴.۱.۲ رباتهای انساننمای پیشرفته
Tesla Optimus:
- آموزش در محیطهای شبیهسازیشده با وفاداری بالا
- کنترل حرکت در محیط کارخانه شبیهسازیشده
- هدف: سازگاری مانند کارگران انسانی
Figure AI Helix:
- اولین VLA قادر به کنترل کل بدن بالایی یک انساننما با فرکانس بالا
- کنترل بازوها، دستها، تنه، سر و انگشتان
- معماری دوسیستمی برای دقت و سرعت بالا
۴.۲ محیطهای شبیهسازی
۴.۲.۱ NVIDIA Isaac Sim
Isaac Sim یک پلتفرم شبیهسازی رباتیک با کارایی بالا است که:
- بر اساس OpenUSD برای بازنمایی دقیق فیزیک
- امکان آموزش سریع مدلها در محیطهای مجازی
- پشتیبانی از انتقال sim-to-real
۴.۲.۲ Habitat 3.0
Habitat یک شبیهساز سریع و واقعگرایانه است که:
- از رباتها و آواتارهای انساننما پشتیبانی میکند
- امکان همکاری انسان-ربات در محیطهای خانگی را فراهم میکند
- برای benchmark PARTNR استفاده میشود
۴.۳ مجموعهدادهها
۴.۳.۱ Open X-Embodiment
این مجموعه داده حاصل همکاری ۲۱ موسسه است و شامل:
- بیش از ۱ میلیون اپیزود
- ۲۲ تجسم مختلف ربات
- تنوع بالا در وظایف و محیطها
۴.۳.۲ PARTNR Benchmark
یک چارچوب استاندارد برای ارزیابی برنامهریزی و استدلال در همکاری انسان-ربات:
- ۱۰۰,۰۰۰ وظیفه زبان طبیعی
- ۶۰ خانه
- بیش از ۵,۸۰۰ شیء منحصربهفرد
۵. کاربردهای عملی و صنعتی
۵.۱ صنعت و تولید
دستکاری پیشرفته: رباتهای مجهز به VLA میتوانند وظایف پیچیدهای مانند مونتاژ قطعات غیراستاندارد، بازرسی کیفیت و بستهبندی محصولات متنوع را انجام دهند.
مزایا:
- سازگاری با خطوط تولید پویا
- کاهش نیاز به برنامهریزی دستی
- توانایی یادگیری وظایف جدید با حداقل داده
۵.۲ لجستیک و انبارداری
عملیات انبار:
- اجرای دستورات pick-and-place از طریق زبان طبیعی
- مرتبسازی خودکار اشیاء بر اساس ویژگیها
- ناوبری هوشمند در محیطهای پرازدحام
آمار:
- بازار جهانی رباتیک لجستیک در حال رشد ۱۵٪ سالانه
- کاهش ۴۰٪ در زمان پردازش سفارشات
۵.۳ مراقبتهای بهداشتی
کاربردهای بالینی:
- تحویل تجهیزات پزشکی در بیمارستانها
- کمک به حرکت بیماران
- تفسیر علائم و اشیاء در زمینه پزشکی
رباتهای جراحی:
- استفاده از VLA برای تصمیمگیری بهتر در حین عمل
- اتونومی end-to-end در حوزههای محدود
- نتایج برتر نسبت به عملکرد انسانی در برخی موارد
۵.۴ کشاورزی دقیق
کاربردها:
- شناسایی و برداشت محصولات رسیده
- تشخیص بیماریهای گیاهی
- مدیریت هوشمند آبیاری و کودپاشی
۵.۵ خدمات خانگی
دستیارهای خانگی:
- تمیزکاری هوشمند با درک محیط
- سازماندهی اشیاء
- تعامل طبیعی با اعضای خانواده
مثالها:
- جاروبرقیهای ربات با نقشهبرداری پیشرفته
- رباتهای آشپزخانه با قابلیت دستکاری دقیق
۶. چالشها و محدودیتهای موجود
۶.۱ چالشهای فنی
۶.۱.۱ شکاف واقعیت (Reality Gap)
یکی از بزرگترین چالشها در رباتیک تجسمیافته، تفاوت بین عملکرد در شبیهسازی و دنیای واقعی است. مدلهایی که در محیطهای شبیهسازیشده عملکرد عالی دارند، معمولاً در مواجهه با پیچیدگیهای دنیای واقعی دچار افت کارایی میشوند.
عوامل موثر:
- مدلسازی ناکامل فیزیک (اصطکاک، خواص مواد، دینامیک تماس)
- تفاوتهای نوری و بصری (نورپردازی، بافتها، انعکاس)
- تاخیرهای سیستم واقعی
- عدم قطعیتهای محیطی غیرقابل مدلسازی
راهکارهای موجود:
- Domain randomization: ایجاد تنوع در پارامترهای شبیهسازی
- System identification: کالیبراسیون دقیق مدلهای فیزیکی
- یادگیری انتقالی پیشرفته
- استفاده از دادههای واقعی در کنار شبیهسازی
۶.۱.۲ نیازهای محاسباتی بالا
مدلهای VLA پیشرفته با میلیاردها پارامتر نیازمند منابع محاسباتی قابلتوجهی هستند:
الزامات سختافزاری:
- GPUهای پرقدرت برای استنتاج بلادرنگ
- حافظه بالا برای نگهداری مدلهای بزرگ
- پردازندههای edge computing برای کاهش تاخیر
مصرف انرژی:
- چالش در رباتهای باتریدار
- محدودیت زمان عملیاتی
- نیاز به بهینهسازی مدل
راهکارها:
- کوانتیزاسیون مدل (تبدیل FP32 به INT8)
- Pruning و حذف وزنهای غیرضروری
- Knowledge distillation
- معماریهای کارآمدتر (MobileNet، EfficientNet)
۶.۱.۳ استحکام و امنیت
رباتهای مبتنی بر یادگیری ماشین ممکن است در برابر شرایط غیرمنتظره یا حملات مخرب آسیبپذیر باشند.
آسیبپذیریها:
- حملات مخالف (Adversarial attacks) روی ورودیهای بصری
- دستورات زبانی مبهم یا متناقض
- شکست در موقعیتهای خارج از توزیع (out-of-distribution)
الزامات ایمنی:
- مکانیزمهای توقف اضطراری
- سیستمهای پشتیبان
- اعتبارسنجی ورودی و خروجی
۶.۱.۴ دستکاری دقیق و کنترل نیرو
تعامل با اشیاء شکننده یا در محیطهای پیچیده نیازمند کنترل دقیق نیرو و گشتاور است.
چالشها:
- محدودیت حسگرهای نیرو/گشتاور
- تاخیر در بازخورد حسی
- نیاز به مدلهای دینامیکی دقیق
۶.۲ چالشهای دادهای
۶.۲.۱ کمبود داده عملی
برخلاف دادههای متنی و تصویری که بهوفور در اینترنت موجود است، دادههای نمایشی رباتیک محدود و گرانقیمت هستند.
دلایل محدودیت:
- هزینه بالای ساخت و راهاندازی رباتها
- زمانبر بودن جمعآوری داده
- نیاز به تخصص برای تلهاپریشن
- تنوع کم در وظایف و محیطها
راهکارهای موجود:
- شبیهسازیهای واقعگرایانه
- data augmentation
- یادگیری انتقالی از حوزههای مرتبط
- استفاده از دادههای synthetic
۶.۲.۲ تنوع تجسمها (Embodiment)
رباتهای مختلف دارای ساختارهای مکانیکی، حسگرها و عملگرهای متفاوت هستند. مدلی که برای یک ربات آموزش دیده، ممکن است بهراحتی به ربات دیگری انتقال نیابد.
راهکارها:
- آموزش cross-embodiment
- استفاده از بازنماییهای انتزاعیتر
- یادگیری meta-learning
۶.۳ چالشهای اخلاقی و اجتماعی
۶.۳.۱ تأثیر بر اشتغال
اتوماسیون پیشرفته میتواند منجر به جابهجایی شغلی در بسیاری از صنایع شود.
نگرانیها:
- از دست رفتن مشاغل تکراری و دستی
- نیاز به آموزش مجدد نیروی کار
- افزایش نابرابری اقتصادی
راهکارهای پیشنهادی:
- سرمایهگذاری در آموزش و بازآموزی
- ایجاد مشاغل جدید در حوزه نگهداری و برنامهنویسی رباتها
- سیاستگذاریهای حمایتی
۶.۳.۲ حریم خصوصی و امنیت
رباتهای مجهز به دوربین و حسگرهای پیشرفته میتوانند اطلاعات حساس جمعآوری کنند.
مسائل:
- جمعآوری دادههای بصری از افراد بدون رضایت
- امکان نقض حریم خصوصی در محیطهای خانگی
- خطر سوء استفاده از دادهها
الزامات:
- رمزگذاری دادهها
- شفافیت در جمعآوری و استفاده از داده
- رعایت مقررات حفاظت از داده (مانند GDPR)
۶.۳.۳ مسئولیتپذیری
در صورت بروز خطا یا آسیب توسط ربات، تعیین مسئول چالشبرانگیز است.
سوالات کلیدی:
- چه کسی مسئول است: سازنده، برنامهنویس، کاربر؟
- چگونه میتوان تصمیمات مدلهای پیچیده را توضیح داد؟
- چه استانداردها و مقرراتی باید وضع شود؟
۶.۳.۴ تعصب الگوریتمی
مدلهای یادگیری ماشین میتوانند تعصبات موجود در دادههای آموزشی را تقویت کنند.
مثالها:
- تشخیص نادرست اشیاء یا افراد از فرهنگهای مختلف
- عملکرد نابرابر در محیطهای متنوع
- تبعیض در ارائه خدمات
راهکارها:
- تنوع در دادههای آموزشی
- ممیزی منظم مدلها برای شناسایی تعصب
- استفاده از روشهای fairness-aware learning
۶.۴ چالشهای اقتصادی
۶.۴.۱ هزینه بالای توسعه و استقرار
سرمایهگذاری اولیه برای سیستمهای رباتیک پیشرفته قابلتوجه است:
هزینهها:
- طراحی و ساخت سختافزار
- توسعه و آموزش مدلهای نرمافزاری
- تست و اعتبارسنجی
- نگهداری و بهروزرسانی
موانع ورود:
- محدودیت برای استارتاپها و شرکتهای کوچک
- زمان طولانی بازگشت سرمایه
۶.۴.۲ مقیاسپذیری
گذار از نمونههای آزمایشگاهی به استقرار تجاری در مقیاس بزرگ چالشبرانگیز است:
چالشها:
- تضمین عملکرد پایدار در محیطهای متنوع
- پشتیبانی فنی و نگهداری
- استانداردسازی و interoperability
۷. چشمانداز آینده و فرصتهای پژوهشی
۷.۱ روندهای نوظهور
۷.۱.۱ هوش فیزیکی عمومی (General Physical Intelligence)
پژوهشگران در حال حرکت به سمت ایجاد سیستمهایی هستند که بتوانند طیف گستردهای از وظایف فیزیکی را بدون آموزش خاص انجام دهند، مشابه هوش مصنوعی عمومی (AGI) اما در حوزه فیزیکی.
اهداف:
- رباتهای چندمنظوره قابل تنظیم برای وظایف مختلف
- یادگیری سریع از تجربههای محدود
- انتقال دانش بین وظایف و محیطهای متفاوت
پیشرفتهای مورد نیاز:
- مدلهای پایهای قویتر با قابلیت استدلال فیزیکی
- معماریهای کارآمدتر برای یادگیری چندوظیفهای
- روشهای یادگیری مستمر (continual learning)
۷.۱.۲ ترکیب مدلهای زبانی بزرگ با رباتیک
مدلهای زبانی بزرگ مانند GPT-4 و Claude نقش فزایندهای در رباتیک ایفا میکنند:
کاربردها:
- برنامهریزی وظایف پیچیده
- استدلال common-sense
- تعامل طبیعی با انسانها
- تولید برنامههای قابل اجرا از توضیحات زبانی
مثالها:
- استفاده از LLM برای تجزیه دستورات پیچیده به زیروظایف
- توضیح رفتار ربات به زبان قابل فهم انسان
- یادگیری از راهنماییهای زبانی
۷.۱.۳ یادگیری self-supervised و خودکار
کاهش وابستگی به دادههای برچسبخورده:
روشها:
- پیشبینی حالت آینده از مشاهدات فعلی
- بازسازی دادههای ورودی
- یادگیری بازنماییهای مفید بدون برچسب
مزایا:
- کاهش هزینه جمعآوری داده
- امکان یادگیری از تجربیات عادی
۷.۱.۴ رباتهای soft و bio-inspired
طراحیهای الهامگرفته از طبیعت:
ویژگیها:
- انعطافپذیری مکانیکی
- سازگاری بهتر با محیط
- تعامل ایمنتر با انسانها
مثالها:
- gripperهای soft برای دستکاری اشیاء شکننده
- عملگرهای پنوماتیک
- مواد هوشمند با قابلیت تطبیق
۷.۲ فرصتهای پژوهشی
۷.۲.۱ بهبود کارایی محاسباتی
اولویتها:
- توسعه معماریهای سبکتر
- بهینهسازی برای سختافزار edge
- استفاده از چیپهای تخصصی (TPU، NPU)
۷.۲.۲ یادگیری چندحسی (Multimodal Learning)
یکپارچهسازی اطلاعات از حسهای مختلف:
حسها:
- بینایی (RGB، depth، thermal)
- شنوایی
- لامسه (نیرو، فشار، لغزش)
- حسهای proprioceptive (موقعیت، سرعت)
مزایا:
- درک جامعتر از محیط
- استحکام بیشتر در برابر شکست حسگرها
- قابلیت انجام وظایف پیچیدهتر
۷.۲.۳ تعامل انسان-ربات
زمینههای تحقیقاتی:
- طراحی رابطهای کاربری بصری
- درک اشاره و زبان بدن
- همکاری ایمن در فضاهای مشترک
- adaptation به ترجیحات فردی
۷.۲.۴ یادگیری از نمایشهای انسانی
استفاده از ویدئوهای انسانها برای آموزش رباتها:
روشها:
- استخراج دانش از ویدئوهای آموزشی
- تقلید از رفتار انسانی
- انتقال مهارت cross-embodiment
چالشها:
- تفاوت بین قابلیتهای انسان و ربات
- نیاز به retargeting حرکات
۷.۳ کاربردهای نوظهور
۷.۳.۱ اکتشاف فضایی و زیردریایی
رباتهای مستقل برای محیطهای خطرناک:
کاربردها:
- کاوش سیارات و ماهها
- اکتشاف اقیانوسها
- عملیات در محیطهای رادیواکتیو
۷.۳.۲ مدیریت بحران و نجات
وظایف:
- جستجو و نجات در زلزله
- مهار آتشسوزی
- بازرسی زیرساختهای آسیبدیده
۷.۳.۳ آموزش و پژوهش
رباتهای آموزشی برای:
- یادگیری STEM
- پژوهش در رباتیک و هوش مصنوعی
- شبیهسازی سناریوهای پیچیده
۷.۳.۴ هنر و سرگرمی
کاربردها:
- رباتهای هنرمند (نقاشی، موسیقی)
- بازیگران رباتیک در تئاتر و سینما
- همراهان تعاملی
۷.۴ پیشبینیهای دهه آینده
۷.۴.۱ دهه ۲۰۲۵-۲۰۳۰
پیشبینیها:
- گسترش تجاری رباتهای خدماتی در مشاغل
- ورود رباتهای انساننمای قیمتمقرون به بازار
- استانداردسازی پلتفرمهای رباتیک
۷.۴.۲ دهه ۲۰۳۰-۲۰۴۰
انتظارات:
- رباتهای خانگی چندمنظوره رایج
- یکپارچگی عمیقتر رباتها در جامعه
- ظهور صنایع جدید مرتبط با رباتیک
۸. نتیجهگیری و توصیهها
۸.۱ یافتههای کلیدی
این پژوهش نشان داد که همگرایی هوش مصنوعی و رباتیک در قالب هوش مصنوعی تجسمیافته، نقطه عطفی در تاریخ فناوری است. مدلهای بینایی-زبان-عمل بهویژه نشان دادهاند که میتوانند:
۱. تعمیمپذیری قوی: انجام وظایف متنوع بدون نیاز به برنامهنویسی خاص ۲. درک چندحسی: یکپارچهسازی اطلاعات بصری، زبانی و حسی ۳. یادگیری کارآمد: استفاده از دانش پیشآموخته برای یادگیری سریع وظایف جدید ۴. تعامل طبیعی: برقراری ارتباط با انسانها از طریق زبان طبیعی
۸.۲ دستاوردهای اصلی
از منظر علمی:
- توسعه معماریهای نوین که سه حوزه بینایی، زبان و عمل را یکپارچه میکنند
- ایجاد مجموعهدادههای بزرگ cross-embodiment
- پیشرفت در روشهای انتقال sim-to-real
از منظر صنعتی:
- محصولات تجاری در صنایع مختلف
- کاهش قیمت سختافزار رباتیک
- افزایش دسترسی به ابزارهای توسعه
۸.۳ توصیهها
۸.۳.۱ برای پژوهشگران
اولویتهای پژوهشی:
- تمرکز بر بهبود کارایی و کاهش هزینه محاسباتی
- توسعه معیارهای استاندارد برای ارزیابی
- پژوهش بینرشتهای با علوم شناختی و عصبشناسی
همکاری:
- مشارکت در پروژههای open-source
- به اشتراکگذاری دادهها و مدلها
- ایجاد استانداردهای مشترک
۸.۳.۲ برای صنعت
استراتژیهای توسعه:
- سرمایهگذاری در زیرساختهای رباتیک
- آموزش نیروی انسانی متخصص
- pilot projectها قبل از استقرار گسترده
مسئولیتپذیری:
- رعایت استانداردهای اخلاقی
- شفافیت در قابلیتها و محدودیتها
- همکاری با نهادهای تنظیمگر
۸.۳.۳ برای سیاستگذاران
اقدامات مورد نیاز:
- تدوین چارچوبهای قانونی برای رباتیک
- حمایت از تحقیق و توسعه
- برنامههای بازآموزی نیروی کار
ملاحظات اجتماعی:
- رسیدگی به تأثیرات اشتغال
- تضمین دسترسی عادلانه به فناوری
- حفاظت از حریم خصوصی شهروندان
۸.۴ جمعبندی
رباتیک پیشرفته و هوش مصنوعی تجسمیافته نه تنها پرسش «چه زمانی جسم و هوش ترکیب میشوند؟» را پاسخ دادهاند، بلکه نشان دادهاند که این ترکیب در حال حاضر در حال وقوع است. ما در آغاز دوران جدیدی هستیم که در آن ماشینها نهتنها میاندیشند، بلکه بهطور مؤثر در دنیای فیزیکی عمل میکنند.
با این حال، تحقق کامل پتانسیل این فناوری نیازمند همکاری بینالمللی، سرمایهگذاری پایدار، و رویکردی مسئولانه به توسعه است. باید اطمینان حاصل کنیم که این پیشرفتها به نفع کل بشریت باشند و بهگونهای مدیریت شوند که خطرات را به حداقل برسانند.
آینده رباتیک پیشرفته روشن است، اما مسیر رسیدن به آن نیازمند تلاش جمعی، نوآوری مداوم و تعهد به اصول اخلاقی است. جسم و هوش اکنون در حال یکپارچه شدن هستند، و این تنها آغاز سفر است.